为实现全封闭煤棚无组织颗粒超低排放,针对煤棚原料存储工作区域,在保证封闭措施符合全封闭的基本条件下,采取网格化无组织排放控制措施,根据物料属性及管控风险,配套
雾炮机等措施,治理措施必须和监测措施进行联动,储运工作中确保起尘后能迅速抑制,肉眼无可见扬尘飘散外溢。
煤棚内安装雾炮机抑尘系统,要求覆盖整个料棚,雾炮机在煤棚两侧安装,要求雾炮机水平旋转±160°,垂直方向上 -10°至 60°可调,可以保证场地内各处均能喷洒到位,能够覆盖整个煤棚。供水管道采用防冻措施(考虑保温、伴热,并设置合理的放水系统);将煤棚内全部雾炮机安装鹰眼系统,1套鹰眼系统控制1台雾炮,实现棚内全部雾炮自动控制。所有雾炮需接入业主无组织排放管控平台,能够实现远程控制,预留远程通讯接口。
一、煤棚鹰眼联动雾炮机要求
(1)雾炮机能通过自身的加压装置将水输送至喷头,由风机将雾化直径≤30µm的水珠颗粒抛射至起尘位置,并能有效地吸附悬浮在空气中的粉尘颗粒,达到抑尘作用。乙方为本项目所供设备需通过省级质量部门检测通过,并提供省级质量检验检测报告复印件。由风机将雾化的水珠颗粒抛射至起尘位置。
(2)雾炮机控制方式:风机、水加压泵、旋转及俯仰机构均为电机驱动,能达到手动/遥控/程序控制功能,且操作简单。遥控有效距离不小于100米。
(3)雾炮机具有自动泄水功能,当设备停止工作时,本体设备管道内的水自动排净。
(4)雾炮机具备相序保护功能和自动停机保护功能,当电流过大、相序接错时,设备自动停止运行;且风机电机、水泵电机、旋转电机和俯仰电机分别具备单独过载保护。
(5)雾炮机及配套水系统需要安装保温伴热装置,保证冬季(-30℃以下)正常使用。
(6)设备整套采用耐腐蚀304不锈钢棒材加工而成,且具有互换性。不得全部或局部采用铸造品或铜制品(需提供进口产品证明)。
(7)雾炮所用的管材、管件、阀门及压力表,均为不锈钢304材质。
(8)
固定式雾炮机外露的螺栓,材质为不锈钢304;其他结构件螺栓采用高强度螺栓。
(9)雾炮风筒支撑架及固定底座的连接,应使用强度较大的回转支承结构,不得使用强度较小易损耗的轴承、铜合金或高分子塑料(旋转齿轮需有防护不外露)。
(10)雾炮机本体配置过滤精度为100μm的不锈钢过滤器,拆装容易并能够适用甲方水质且不堵塞喷头。
(11)雾炮机零部件应满足长时间恶劣环境连续运转需求,设备应配置水加压泵,水加压泵必须为多级离心式不锈钢水泵,轴承采用全密封轴承。
(12)雾炮机应配置风机及安全防护装置。风机的叶片为耐腐蚀的铝合金制作,不得使用强度较小易损耗的高强塑料制作,且出厂前必须经过动平衡测试,并提供检测报告。
(13)所有的材料及零部件(或元器件)应符合有关规范的要求,且应是新型的和优质的,并能满足当地环境的要求。
(14)雾炮机风筒水管线和固定底座的水管线连接件必须为万向旋转连接器,为不锈钢304材质,防止软管连接处,因长时间连续旋转而损坏。
(15)每台固定式雾炮机均设置一个控制箱,具有防尘、防水性能,防护等级为IP65或以上。控制箱箱体采用2mm厚304不锈钢材质,箱体板厚不低于2mm。箱体为双门(含有机玻璃)设计。在控制箱上预留有反馈信号接口,具有远程监控设备运行状态。设备内置西门子PLC控制器系统,可实现远程、就地、遥控三种控制方式。
(16)为了保护设备安全运行,方便故障排除,泵前增设电接点压力表,泵后增设耐震压力表,水压低于设定值时自动停机保护。
(17)雾炮机需要支持远程控制摇摆喷射、定点喷射等功能,并且确保喷射精度符合要求。
(18)雾炮机远程提供如下信号,如:远程、故障、缺水、运行、角度(要求用编码器测量雾炮的角度)等信息,并支持远程控制。所有雾炮的启停信号接入无组织管控平台,预留通讯接口。
(19)雾炮机所需动力为AC380V/50HZ的三相五线电源,供电功率满足雾炮技术要求,用电分别取自1#、2#料棚内的380V低压配电柜,此电缆的设计及供货由供方负责。
(20)雾炮机电仪要求:
1、雾炮机及鹰眼系统自带低压动力箱柜、控制柜、就地操作箱、仪表等设备,系统内部所需的电缆、桥架及支架、电仪安装附材由供方设计和供货。
2、需方仅为供方每台雾炮、鹰眼提供1路电源,雾炮、鹰眼系统内部设备所需电源由供方自带低压动力箱柜、控制柜、就地操作箱自己提供配电。
3、供方提供的0.4kV开关柜采用GGD型固定式低压柜,现场就地控制箱采用2mm厚304不锈钢材质,所有室外电气控制盘均应满足行业相关标准要求,考虑防雨、防水、防尘、接地措施,防护等级不低于IP65。
4、不得选用淘汰的低效高耗类型的电机,防护等级为IP54,采用佳木斯电机股份有限公司、南阳防爆集团有限公司、上海电机厂或同档次品牌。
5、低压90kW 及以上电机根据实际工况装设变频器或软起动器,其余电机均采用直接起动方式。
6、动力、控制电缆均采用交联聚氯乙烯铠装阻燃电缆。控制、保护、计算机系统电缆应采用交联聚氯乙烯屏蔽铠装阻燃电缆。
7、电缆桥架采用钢架和阻燃桥架,局部交叉或有困难部位,则采用能阻断火路的防火槽盒和加设防火罩盖,各电缆通道设置防火墙或阻火段。
8、低压电气设备接触器、继电器选择西门子或同档次产品,空开选用施耐德品牌或同档次产品。现场操作箱上开关按钮等选择防尘型号。微型继电器选用和泉或同档次产品继电器;
9、PLC系统选择西门子S7-1500CPU系列产品,PLC输出和输入另留有15%的备用点,I/O模块的信号与现场信号需进行有效隔离,数字量输入/输出采用继电器隔离,模拟量输入/输出采用配电器隔离,隔离配电设备选用南京优贝、菲尼克斯、托尔克等国内外大型仪表厂家产品。测量仪表选择重庆川仪、罗斯蒙特、霍尼韦尔、西门子等国内外大型仪表厂家产品,检测仪表加装隔离设备后引入PLC系统。
(21)雾炮机适用的标准和规范包括:
(1)GB985-88 《气焊、手工电弧焊及气体保护焊焊缝坡口的基本形式与尺寸》
(2)JB8 《产品标牌》
(3)GB8923-88 《涂装前钢材表面锈蚀等级和除锈等级》
(4)GB755 《电动机基本技术要求》
(5)GB4208 《电动机外壳防护等级分类》
(6)GB3767 《噪声源声功率级的测定工程法和准工程法》
(7)GBJ233-82 《电器装置工程施工及验收规范》
(8)DB13/T 1264-2010 《远程射雾技术应用规范》
(9)Q/UT1001-2009 《工业遥控器》
二、料棚智能化联动管控设计
此项目主要针对煤棚、料场进行智能化粉尘综合治理。
根据料场的实际工况,无组织料场治理要求解决超低排放要求的同步性问题。料场内在装料、卸料、喂料、转运等生产作业过程中引发的产尘源点多、面广,阵发性强,存在时间和空间双维度的不确定性,因此,在这种工况复杂、扬尘点产生位置跟数量不确定性都很高的情况下,靠传统的人工控制方式或者简单的控制系统是满足不了料场的实际治理需求的,更提供不了事前、事中、事后整个的治理闭环证据链,因此,必须要通过无人化、智能化的管控治系统来解决这个问题。
控制系统需要形成闭环控制系统:即拥有输入单元,输出单元,输出再到输入的反馈单元才能形成一套闭环控制系统,实现无人化、智能化管控。
根据上方的“原料堆场无组织粉尘治理原理图”要求通过“鹰眼监控系统→控制中心→除尘设施(超细雾炮/干雾等抑尘设施)→鹰眼识别监控系统”形成了一套完整的闭环控制系统。
该闭环控制系统功能:
(1)形成一个完整的治理闭环证据链,实现生产、污染与治理同步运转,同时相应的治理记录及视频上传到管控治一体化平台方便后期核查;
(2)实现真正的无人化、智能化治理,通过这个系统完全取代传统靠人工去启停的控制模式,不再需要专人负责治理设施的控制工作,使得整个料场的生产与环保实现常态化;
(3)通过精准的识别,只在有污染的情况下启动治理设施进行抑尘治理,降低耗水量,耗电量;
(4)通过精准的识别与抑尘治理,避免传统治理设备常开,导致路面积水,物料含水率过高,影响后续生产工序等问题。
项目包括以下治理措施:
(1)智能联动——采用鹰眼智能识别技术,联动现场的降尘或抑尘措施,适合现场实际作业情况在源头抑制粉尘。
(2)全方位监测——结合视觉识别、TSP等多重监测手段的实时监测数据,进行料场区域的治理联动算法再优化,实现应对不同生产作业场景、自然干扰场景下的全方位治理适应。
(3)针对性防控——采用人工智能、大数据等算法技术,结合生产、治理、监测、监控等多源数据进行交叉分析,提前预防阻止封闭料棚内粉尘向外界飘散。
要求方案需及时通过对料场区域布设可自动识别和记录并与现有治理设备智能联动的鹰眼识别系统,实现整体物料堆存区域的生产运转和治理过程同步监控和记录保存,提供无组织治理过程的完整数据闭环和记录,并以此全面提升无组织排放治理自动化、无人化和智能化的快速精准管控水平。
三、
鹰眼视觉识别系统
1)鹰眼视觉识别系统要求
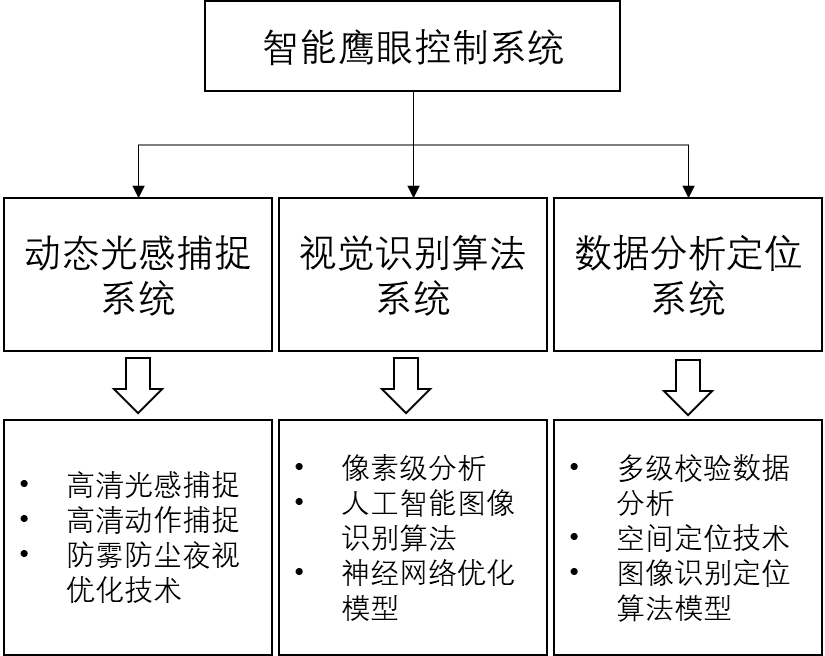
智能鹰眼控制系统要求包括动态光感捕捉系统、视觉识别算法系统、数据分析定位系统三方面内容,采用通过动态光感捕捉系统,实时动态反映车间内部生产活动及烟尘排放情况,采用基于机器学习开发的图像识别算法系统以及结合不断优化的神经网络算法模型,准确识别生产活动及烟尘排放情况,进行进一步的治理决策分析。
智能鹰眼控制系统要解决料场生产治理设备同步运转问题,能够满足超低排放对料场管控的要求。
智能化物料存储抑尘管理系统示意图
(2)鹰眼识别监控系技术要求
|
技术要求(以下内容为参考,请供方根据实际设计数据进行修改) |
l 要求达到《关于推进实施钢铁行业超低排放的意见》(环大气〔2019〕35号)要求,设计方必须对图像识别系统建设的设计、施工、调试、投入运行、通过环保部门验收达标的工作全程追踪;
l 图像识别系统应具备手动标定、后台自我驯服升级、自动提高识别精度的功能,鹰眼系统摄像头像素达到200万像素;
l 准确识别铲车、货车、堆取料机等车辆或设备的类型,并根据不同类型的设备工作的特点,通过模型计算判别是否存在污染行为,比如铲车是否在装卸料,货车是否在自行倒料,堆取料机是否在工作等,要求准确率>99%;
l 必须能够实时计算出目标在棚内的绝对位置坐标,响应时间<1s;
l 必须对粉尘扬尘扩散初期的尘羽有准确的识别和辨识分类,并有效地区别尘羽和雾,要求准确率>85%;
l 必须与全厂集中管控平台完全兼容;
l 视觉识别系统在识别出污染行为发生时,必须对整个过程进行录像,并且能将录像文件上传到超低集中控制系统;
l 集中管控平台应实现图像识别系统采集数据(含污染行为录像)的保存、分析、可视化展示、智能决策、治理核查。 |
4.2 智能喷雾抑尘设备联动技术要求
现场治理设备需要跟鹰眼识别系统相互配合完成治理闭环记录,后期需要对现有的治理设备做智能联动,因此,对治理设备后期可以进行智能联动的相关技术要求如下:
|
技术要求(以下内容为参考,请供方根据实际设计数据进行修改) |
l 控制方式:图像识别智能控制;
l 污染发生到响应治理时间:≤5s;
l 0人工操作;
l 能适应高浓度Fe2O3、FeO、CaO、CaCO3等腐蚀性颗粒物污染环境下长时间稳定工作;
l 需要与集中控制系统完美兼容;
l 能适应高频次频繁启停工作;
l 控制系统硬件采用西门子、施耐德等国际知名品牌的高端主流型号的产品,提高控制系统的可靠性,在电路设计上充分考虑安全、可靠。 |